Reto 11
Se trata de controlar el robot maqueen con otra micro:bit a través de la radio y con el acelerómetro. Jugando con las aceleraciones en el eje x (izquierda o derecha) en la micro:bit emisora, controlamos a maqueen (micro:bit receptora) con los giros en los mismos sentidos. Modificando las aceleraciones en el eje y (adelante o hacia atrás) en la micro:bit emisora, controlamos los movimientos del robot (micro:bit receptora) en esos sentidos.
Recordamos que los valores de aceleración en eje x varían entre -100 (máximo valor hacia izquierda) y 100 (máximo valor hacia derecha), y en el eje y varían entre -100 (máximo valor hacia adelante) y 100 (máximo valor hacia atrás).
Con este reto conseguimos un control remoto de maqueen a través del acelerómetro de otra micro:bit.
Código Micro:bit emisor:

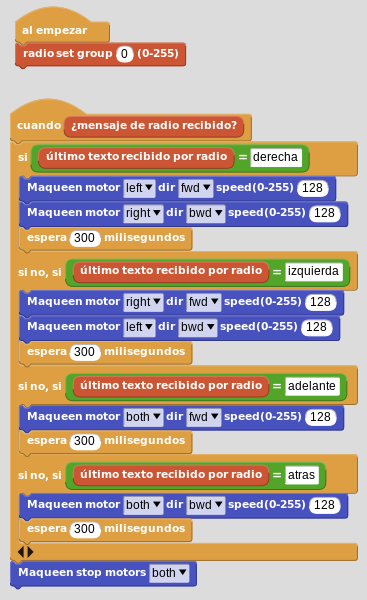
Código de Micro:bit de maqueen (receptor):